

軟件技術(shù)在汽車衡防作弊方面的應(yīng)用
【摘 要】 針對電子汽車衡中常見的作弊類型,本文通過對這些作弊方式的分析、研究,提出了在實際工作中用軟件來解決這些問題的方法,并較好的投入到實際工作中,為維護企業(yè)的經(jīng)濟利益又增添了一道防線。
一、問題的提出
電子汽車衡作為一種準確、方便、快捷的稱重計量設(shè)備被越來越多地應(yīng)用在煤炭、冶金、建材、電力等各行業(yè)中。然而在很多地區(qū)出現(xiàn)了利用電子汽車衡在計量過程中進行稱重作弊的現(xiàn)象,采用各種方式在車輛計量毛重、皮重時做手腳,造成少則幾百公斤、多則幾噸的計量偏差,從中非法牟利。這些作弊種類包括:對稱重傳感器到儀表的電子線路私接非法裝置,來達到計量作弊的目的; 對計量車輛采取帶掛車過重,單車回皮的手段,來達到提高凈重的目的;隨著現(xiàn)在車輛長度的增長, 秤體也在增長,使得計量員在觀察車輛在秤上的計量位置是否合理時有較大的難度,容易使不法人員鉆空子,采用壓秤、不完全上秤等作弊手段;計量員受非法分子的威脅或利誘,在微機稱量確認環(huán)節(jié)上作手腳,改變稱量結(jié)果。這些作弊情況如不及時發(fā)現(xiàn),會給企業(yè)造成巨大的經(jīng)濟損失。因此, 國內(nèi)各計量科研院所、衡器生產(chǎn)廠家都在衡器防做弊方面做了大量的研究。迄今為止,大多數(shù)防作弊技術(shù)采用硬件的檢測方式(如外加攝像頭、光電傳感器), 存在較大的局限性:只能對某種作弊方式進行判斷;硬件安裝在室外,容易受到不法分子破壞;新添硬件增大了維護人員的工作量, 設(shè)備的投入;作弊情況的判斷需要人為參與(例如通過攝像頭觀察臺面情況),系統(tǒng)的客觀真實性很難保證。
計算機現(xiàn)已成為一般電子汽車衡實現(xiàn)管理現(xiàn)代化的標配部件。而計算機具有邏輯判斷能力、運算速度快、工作自動化等特點,是否能利用計算機軟件實現(xiàn)汽車衡防作弊系統(tǒng)的“軟”解決方案? 達到計算機集稱重、防作弊為一身的新型計量稱重系統(tǒng),成為我們研究的重點。
二、汽車衡作弊的常見類型
(一)無線遙控作弊
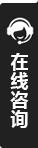
這種作弊方法是利用計量點夜間無人看守或不容易被發(fā)現(xiàn)時,剝開室外傳感器送往儀表
線,串入電子設(shè)備(帶有無線接收裝置),如圖 1 如示。當車輛計量時,用遙控器控制這些電子設(shè)備,從而對送往儀表的信號產(chǎn)生影響,計量的結(jié)果可大、可小,來獲得非法所得。由與設(shè)計這些作弊裝置的人員本身對電子汽車衡的構(gòu)造、原理相當清楚,所以這些裝置很難在計量過程中被發(fā)現(xiàn)。
(二)汽車壓在地面、多車壓秤作弊
汽車壓在地面是指計量時,司機故意把車停在不正確的位置上,造成計量結(jié)果偏小。多車壓秤指一臺車輛計量時,其它非計量車輛的輪子故意壓在秤上,造成計量結(jié)果偏大。(如圖 2 所示)
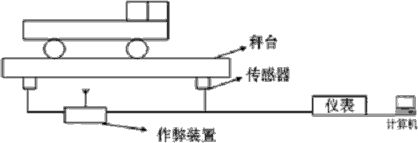 |
圖 1
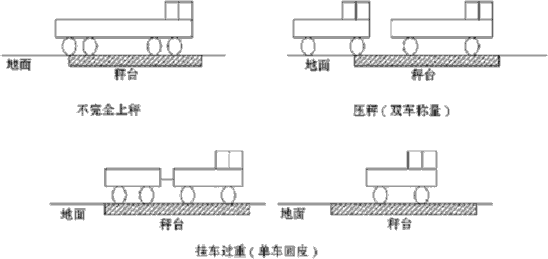 |
圖 2
(三)計量員人為作弊
現(xiàn)階段微機雖然已引入計量工作中,但主要是將數(shù)據(jù)庫管理系統(tǒng)及其應(yīng)用軟件裝入微機中,發(fā)揮了微機數(shù)據(jù)管理的功能,計量的終結(jié)果仍是由計量員得出。這樣計量的重要環(huán)節(jié)和傳統(tǒng)的計量方式存在有相同的弊病,計量結(jié)果容易受人為的影響。計量員可能受經(jīng)濟利益的驅(qū)使,在稱量過程中協(xié)助非法人員作弊。較典型的是計量員利用微機稱量數(shù)據(jù)的終結(jié)果是靠人工確認(如敲擊回車鍵確認或用鼠標點擊確認)的特點,從中確認不合理的數(shù)據(jù),或?qū)ι线叄ǘ?span>所發(fā)生的事情視而 不見。
三、問題的分析、解決
用軟件來解決以上問題,需能找出其中一些共性的規(guī)律。經(jīng)過對汽車衡正常計量情況時的多組數(shù)據(jù)采集、分析,發(fā)現(xiàn)這樣一個規(guī)律(圖 3 表示,該圖是在兩軸汽車的計量過程中得出的,多軸車與此類似):O 到 a1 表示前輪上秤的過程,秤臺的負重變化較大,因此儀表讀數(shù)上升較快;a1 到 a2 表示前輪上秤后,汽車仍在行進,但后輪未上秤,此時秤臺的負重變化不大,所以儀表的讀數(shù)的暫時穩(wěn)定;a2 到 b1 表示后輪上秤的過程,秤臺的負重變化很大,儀表讀數(shù)迅速上升;b1 到 b2 表示前輪,后輪均上秤,儀表讀數(shù)的穩(wěn)定;下秤時與上述的過程相反。a1 到 a2 是前輪單獨在秤臺行進過程時的重量,而 c1 到 c2 表示后輪單獨在秤臺行進過程時的重量,兩者之和大約是 b1 到 b2 區(qū)間的平均重量,即整個車的重量。
 |
圖 3
軟件的設(shè)計思路是記錄車輛在計量時的全部數(shù)據(jù)(包括上衡、下衡的過程數(shù)據(jù)),通過和正常計量(無作弊發(fā)生)下的數(shù)據(jù)比較,來找到解決方法。
對于作弊情況 1,在非法信號串入傳感器的信號線后,儀表的顯示肯定與正常計量情況時有所差別(理論依據(jù):目前使用的傳感器和接線盒全部是純電阻部件,上面的電流、電壓是可以突變的。作弊裝置是通過繼電器的吸合來使外接電阻對稱重信號產(chǎn)生影響,繼電器的動作很短(毫秒級),這使得稱重信號會有明顯跳變;正常情況下,傳感器的彈性元件因受力發(fā)生形變,通過電阻應(yīng)變片將其轉(zhuǎn)換為電阻值的變化,從而測得被測力的大小,其時間較前者要慢很多。)。但此差別,憑人的肉眼觀察是較難發(fā)現(xiàn)的,即使能觀察到,但每天大量的汽車計量,也很容易造成觀測者的疲勞,影響觀測的準確性。現(xiàn)在正是要把這個工作交給速度快,準確性高的微機來完成。如圖 3 所示,如果作弊現(xiàn)象發(fā)生在 a2 到 c1 之間,即通過電子裝置較大幅度增大或減小 b1 到 b2 的區(qū)間中的重量,顯然達不到以上標準的要求(即兩平臺的重量接近于中間平臺的重量,即使有誤差,也應(yīng)在一定的范圍內(nèi)),因而軟件可以很好的排除這種作弊現(xiàn)象; 如果作弊現(xiàn)象發(fā)生在 a1-a2、c1-c2 段,會導(dǎo)致這兩段本應(yīng)平滑稱量曲線有凸起現(xiàn)象,作弊信號越大,凸起越明顯,軟件越容易判別。對于 a1 之前和c2 之后的稱量段,是指車輛前輪上衡和后輪下衡的瞬間,時間特別短,這里如果進行遙控作弊時間很難掌握,往往會落在其它區(qū)域,可不予考慮。
對于作弊情況 2,如果計量車輛沒完全上秤,或者有多車壓秤現(xiàn)象,其計量數(shù)據(jù)波形會于標準的波形相差很大,波形平臺會多于或少于圖 3 所示波形,較容易識別。
對于作弊情況 3,即計量員對計量數(shù)據(jù)施加影響。其人為作弊方式就是把本應(yīng)在汽車停穩(wěn)后(b1 到 b2)確認計量結(jié)果的過程,放在 b1 之前或 b2 之后,使皮重計量結(jié)果偏輕,來達到凈重值的提高。其解決方式采取計算機自動出示計量數(shù)據(jù)(取 b1 到 b2 的均值),不需要人工干預(yù),這樣就保證了計量結(jié)果的客觀性,準確性。
四、系統(tǒng)的實現(xiàn)
(一)軟件部分
軟件的開發(fā)工具選用 VB6.0,主要基于它簡單易學(xué),具有種類繁多、功能強大控件的這些特點, 而且大多工控板卡廠商提供的各自產(chǎn)品的二次開發(fā)實例都是用該語言編程。這樣利于提高軟件開發(fā)的效率。
軟件需要對采集的數(shù)據(jù)進行以下處理或分析:
1. 軟件濾波
高速采集卡、儀表均采集的是稱重傳感器信號,十分微弱(微伏級),容易使干擾侵入系統(tǒng)的前向通道,疊加在信號上,導(dǎo)致數(shù)據(jù)采集誤差加大。雖然數(shù)據(jù)抗干擾性能根本在硬件結(jié)構(gòu),軟件抗干擾只是一個補充,但軟件的編制則要處處考慮到硬件可能的失效,可能受到的干擾等種種問題, 否則容易使上邊判別作弊方式的原則失效,產(chǎn)生錯判、漏判。軟件采用了遞推平均濾波法(又稱滑動平均濾波法):把連續(xù)取 N 個采樣值看成一個隊列,隊列的長度固定為 N,每次采樣到一個新數(shù)據(jù)放入隊尾,并扔掉原來隊首的一次數(shù)據(jù)。(先出原則),把隊列中的 N 個數(shù)據(jù)進行算術(shù)平均運算,就可獲得新的濾波結(jié)果。優(yōu)點:對周期性干擾有良好的抑制作用,平滑度高;缺點:靈敏度低, 對偶然出現(xiàn)的脈沖性干擾的抑制作用較差,不易消除由于脈沖干擾所引起的采樣值偏差。實踐證明, 該種方法在該系統(tǒng)中是較有效的。
無論采用哪種濾波方法,應(yīng)遵循的原則:在盡量濾除干擾信號的同時,不致使作弊信號被濾掉或受到較大損失。
2. 波形平臺判別
波形平臺的正確判別對系統(tǒng)防作弊功能發(fā)揮起著關(guān)鍵作用。經(jīng)過軟件濾波處理后的數(shù)據(jù)已經(jīng)比較規(guī)整,利于波形平臺的判別。平臺通過相鄰 n 個數(shù)據(jù)的跳變量(差量)來判斷,如果相鄰的 n 個數(shù)據(jù)差量較穩(wěn)定既認為進入一個平臺;反之,認為平臺結(jié)束。將平臺的起點與終點的數(shù)據(jù)存入數(shù)組, 可以求出均值,即平臺值。
3. 波形凸起現(xiàn)象判別
凸起仍是通過相鄰值的差量值來判別,但這里需要找出的是因作弊信號引起的凸起。經(jīng)過濾波后的波形雖已經(jīng)較平整,但難免仍有不規(guī)則凸現(xiàn)現(xiàn)象,怎樣和作弊信號的凸起區(qū)分?這里通過和預(yù)值(允許的差值量)的比較來判段,大于預(yù)值即認為有作弊發(fā)生,小于預(yù)值即認為正常下的干擾信號,可以濾去。因此預(yù)值的大小對于系統(tǒng)識別作弊的精度、準確度有很大關(guān)系,預(yù)值設(shè)的小, 系統(tǒng)對微小作弊都能發(fā)現(xiàn),但也會將干擾信號錯判;預(yù)值設(shè)的大,系統(tǒng)只能對較大作弊信號發(fā)現(xiàn), 錯判率降低,但漏判情況會增大很多。兩者之間有矛盾,所以只能找到一個平衡點,盡量兼顧兩者。軟件設(shè)計中,是在標定秤體過程中通過對各個稱的實際稱量情況來自動設(shè)定該預(yù)值的。軟件有一定的智能性、自學(xué)習性,可以根據(jù)每臺秤運行過程中的實際情況作預(yù)值的動態(tài)改變。
(二)硬件部分
軟件的核心部分是微機對采集到的儀表數(shù)據(jù)按上述規(guī)律進行一定的算法處理。這要求稱重儀表既要有較高的采樣速率,便于微機對數(shù)據(jù)進行分析;又可以對原始的模擬信號中的干擾、噪聲成分有濾波作用,減輕軟件處理干擾數(shù)據(jù)的壓力。稱重儀表(靜態(tài)秤儀表),能夠有效的濾除干擾信號,但顯示更新速率較低,一般為 10 次/秒,不能滿足高速采樣要求。為此,在微機中添加了高速采集卡——PCI1710HG,它的采樣數(shù)率達100KS/s,能夠在Windows 操作系統(tǒng)下勝任連續(xù)高速采集的任務(wù),具有可編程功能。采樣速率提高了,難免使濾波功能受到一定的損失,較稱重儀表要差。實際系統(tǒng)中,軟件分別對稱重儀表、高速采集卡的數(shù)據(jù)分別采集。綜合兩組數(shù)據(jù),進行數(shù)據(jù)分析,來確定作弊情況是否發(fā)生。
(三)系統(tǒng)工作(如圖 4 所示)
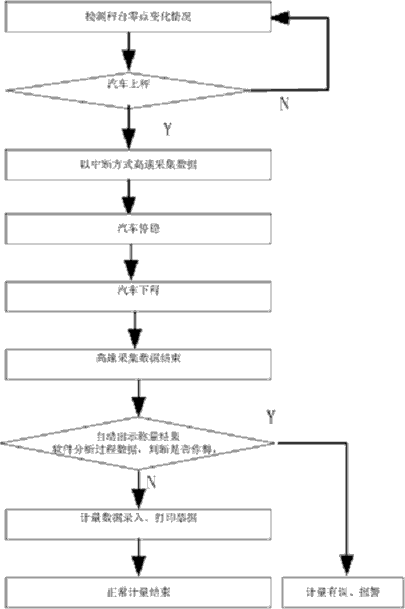
圖 4
五、結(jié)束語
該系統(tǒng)已在實際中投入使用,取得了較好的效果。但也存在一些問題:如秤體條件較差或車輛上秤過快,容易使車輛帶來的振動干擾加大,從而影響判別的準確性。
軟件對汽車衡各種作弊方式雖然不能都解決,也有一定局限性。但它為我們解決這些問題提供了一種新的方法,也為維護企業(yè)在計量工作中的經(jīng)濟利益增添了一道新的防線




